- Korea National Research Foundation (NRF)
- - Conceptualization
- - Fabrication
- - Data analysis
- - Advised by Jeong-Yun Sun
- - Advised by Ho-Young Kim
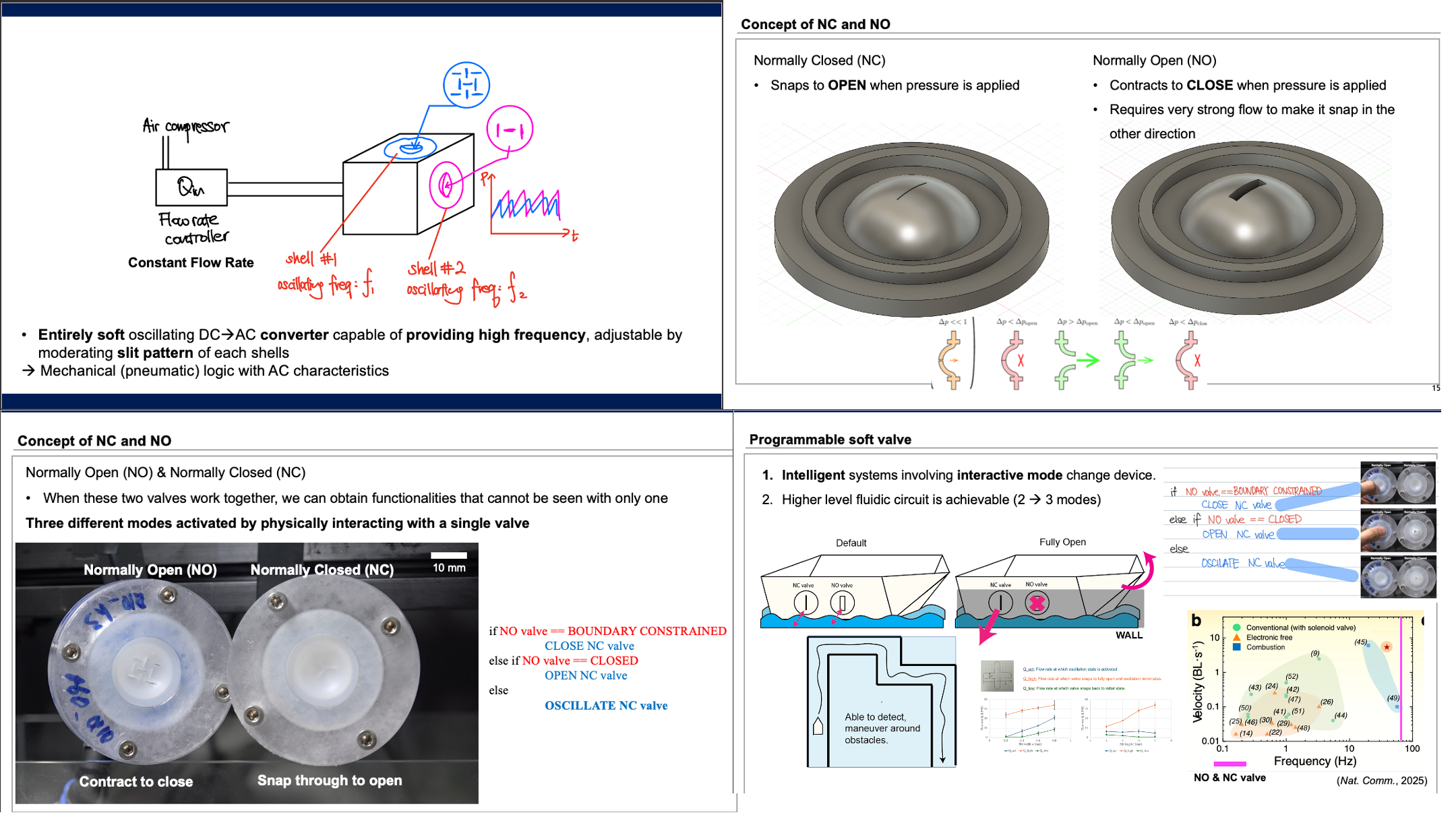
While soft robotics has made significant strides, creating complex behaviors like oscillation and multi-modal actuation often relies on rigid, external electronic controls, limiting the potential for fully autonomous soft systems. This project was motivated by the challenge of embedding more complex functionalities directly into soft fluidic components. Inspired by recent advancements in hysteretic valves that transform continuous input into pulsatile flow, we sought to expand the functional range of such passive systems. By introducing relatively open, relatively closed slit patterns into a soft, buckling shell, we have developed a novel oscillatory valve capable of producing diverse, programmable flow patterns. This design allows a single valve to switch between multiple modes—such as normally-open, normally-closed, and oscillating—purely based on fluidic pressure and physical interaction, creating a building block for advanced, electronics-free mechanical logic in soft robotics.
For further inquiries on this topic contact kwanwoo3496@gmail.com.