Collective behavior of Link-bots
Exploring the functional dynamics of active particles
2024 ~ ongoing
Related fields: Soft Robotics, Swarm Robotics, Collective Behavior, Granular Materials
Publication information
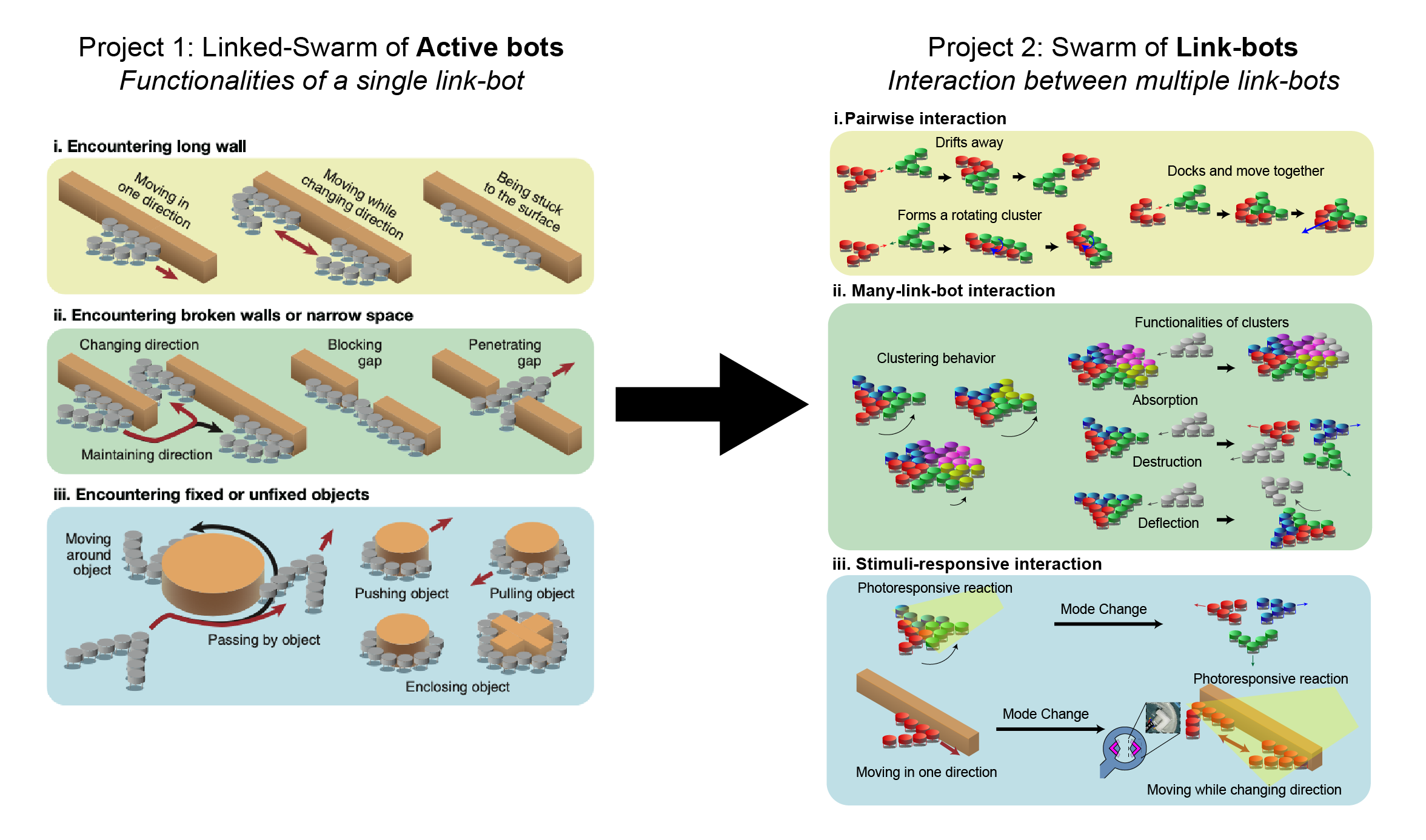
- Project 1: Emergent functional dynamics of link-bots, K. Son, K. Bowal, K. Kim, L. Mahadevan*, and H.-Y. Kim*, Science Advances 11, eadu8326 (2025) DOI
Funded
- Korea National Research Foundation (NRF)
My Role
- Project 1:
- Designed and conducted experiments to show diverse functionalities of link-bots - Fabrication of link-bots & passive-objects - Project 2:
- Team lead - Fabrication, experiment setup/analysis/writing
Credits
- Project 1:
- - Kyungmin Son
- - Kimberly Bowal
- - Advised by L. Mahadevan
- - Advised by Ho-Young Kim
- - Advised by Ho-Young Kim
Project 2:
Motivation
-
The motivation for studying collective behavior is to emulate the remarkable efficiency of natural swarms. Across all scales, from schools of fish to colonies of cells, these collectives use reconfiguration and coordinated movement to perform complex tasks. While the goal is to create artificial versions, current approaches face limitations: macroscale robotic swarms are often too complex to scale, while microscale systems require external fields for control. Therefore, this work seeks to develop self-driven systems that can achieve complex functions using only simple materials, mirroring the efficiency seen in nature.